| Головна |
| « Попередня | ЗМІСТ | Наступна » |
|---|
Одним із серйозних недоліків моделей зростання з екзогенним технічним прогресом є те, що в них рівноважні темпи економічного зростання не залежать від поведінки економічних агентів. Єдиний параметр, який відображає їх поведінку, - норма заощаджень, а й вона, як виявилося, не впливає на темпи зростання в довгостроковому періоді. Таке несоогветствіе реальності послужило поштовхом до розробки моделей зростання з ендогенним технічним прогресом.
В якості першого кроку на цьому шляху можна розглядати модель зростання Менк'ю - Ромера - Вейла. У ній виробнича функція типу Кобба - Дугласа, як фактор виробництва поряд з працею і технічним капіталом присутній людський (інтелектуальний) капітал, під яким маються на увазі знання, кваліфікація, досвід та інші нематеріальні фактори, що сприяють результативності праці навіть при незмінній технології виробництва:

де Н і Е = (1 +X) N - відповідно обсяги інтелектуального капіталу та ефективних одиниць праці, X - приріст продуктивності праці.
Тепер поряд з показником озброєності праці технічним капіталом з'являється показник озброєності праці інтелектуальним капіталом:

а випуск на ефективну одиницю праці дорівнює
Загальні заощадження розподіляються між інвестиціями у фізичний і людський види капіталу: S = sy = sKy + sHy. Тому збільшення обсягів кожного виду капіталу за період визначається за формулами

де Тдо і тн - норми вибуття відповідно фізичного і людського капіталу. У стані динамічної рівноваги озброєність праці обома видами капіталу стабілізується і тому виконуються рівності
З вирішення цієї системи рівнянь визначаються значення | / і / г, а отже і q, в стані динамічної рівноваги і при русі до нього. Якщо кожне з рівнянь вирішити щодо А, то отримаємо рівняння ізоклін, що представляють безлічі поєднань {| /, А}, при яких озброєність праці не змінюється:

Точка їх перетину відповідає динамічної рівноваги.
При технології, відповідної q = | / ° *3A0»5 і п = 0,02, X = 0,03, sK = 0,2, sH= 0,16, тдо = 0,08, тя = 0,1, в поточному періоді vj /0 = 4, А0 = 2. Тоді q() = 40,3 - 20*5 = 2,14; Cq = 0,64 - 2,14 = 1,37. У наступному періоді відповідно до формулами (14.10) озброєність праці технічним капіталом зменшиться на 0,09, а озброєність людським капіталом збільшиться на 0,04. Через певний проміжок часу в економіці встановиться динамічна рівновага при у * = 3,45; h * = 2,39; q * = 2,24; з * = 1,44. Динаміка зміни параметрів представлена на рис. 14.18.
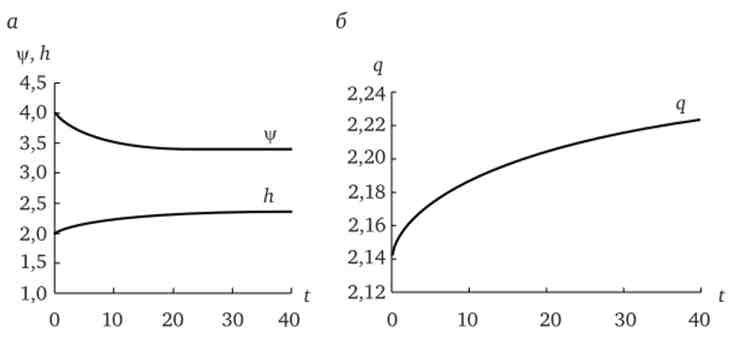
Мал. 14.18. Динаміка капиталовооруженности праці (а) І його продуктивності (б) при переході до динамічної рівноваги
Якщо норми заощаджень будуть підвищені до sK = 0,3, sH = 0,2, то скорочення споживання в найближчі періоди через деякий час буде компенсовано збільшенням споживання в майбутньому. Нове динамічна рівновага встановиться при у * = 16,6; ti = 9,6; q * = 7,2; з = 3,6. Зрушення точки перетину ізоклін озброєності праці технічним (I) і людським (II) видами капіталу, що відповідають системі рівності (14.10), показаний на рис. 14.19. Максимальне споживання на одиницю праці при заданій технології досягається при sK = 0,3 і sH= 0,5. Тоді з часом будуть досягнуті наступні показники: i * = 164; До = 237; q* = 71; з = 14,2. Але для цього потрібно зважитися на різке скорочення поточного споживання протягом декількох найближчих років (рис. 14.20).
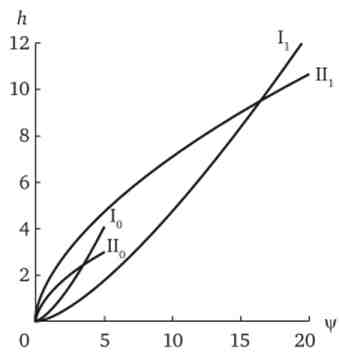
Мал. 14.19. Зміна рівноважних значень капиталовооруженности праці при підвищенні норм заощаджень
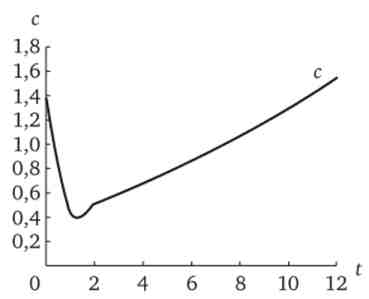
Мал. 14.20. Динаміка середньої норми споживання при збільшенні заощаджень до sK = 0,3 / sH = 0,5
Незважаючи на те, що в моделі Менк'ю - Ромера - Вейла звертається увага на залежність технічного прогресу від вкладень в НДДКР і освіту, це не змінило його екзогенних: на темп зростання в стані динамічної рівноваги не впливає не тільки загальна норма заощаджень, а й її пропорція розподілу між технічним і інтелектуальним капіталами. Як і в моделі Солоу це пов'язано з тим, що через зниження граничної продуктивності обох видів капіталу озброєність праці і його продуктивність стабілізуються на певному рівні, а зростання національного доходу забезпечують екзогенно задані параметри п і А ,.